Change of Coordinates in Three Dimensions
Summary: §§86–92 of the Appendix on Surfaces. The master rigid-motion substitution built up in three layers — in-plane rotation (§§88–89), out-of-plane tilt (§90), and full composition (§§91–92) — that maps original coordinates to new coordinates relative to an arbitrary new origin and orthonormal frame. Six free constants (translation triple absorbs into ). The 3D analogue of Book II’s chapter-2 coordinate-transformations.
Sources: appendix4, §§86–92. Figures 140, 141 in figures138-141.
Last updated: 2026-05-12.
§87 — Translation only
If only the origin changes:
The new coordinates are parallel to the old ones. Three free constants.
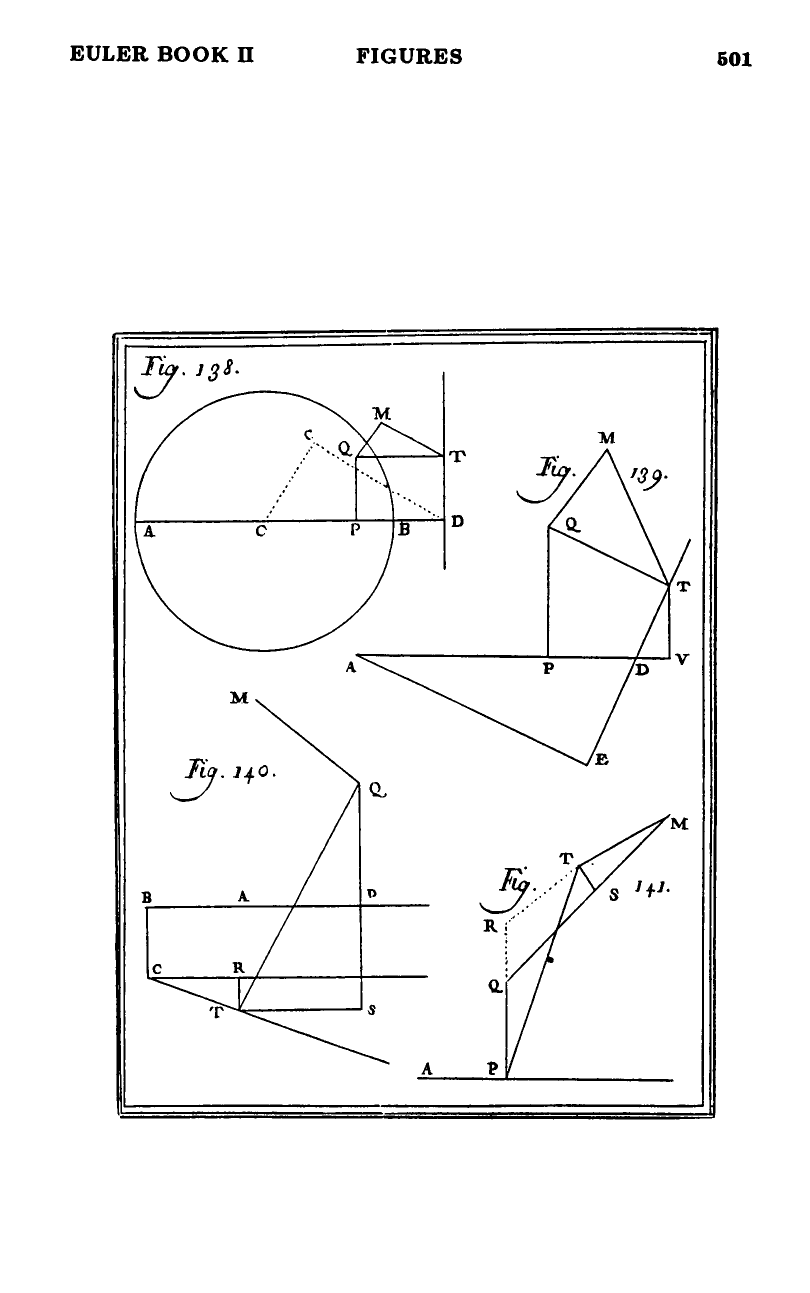
§§88–89 — Rotation of the abscissa axis in the same -plane (figure 140)
Pick a new axis in the plane . The triangle data: , , where is the foot of parallel to the original axis .
For surface point with new coordinates :
Substituting into the chain and :
Three free constants .
§90 — Tilt of the -plane about (figure 141)
Now the second plane changes — rotate the plane about the axis by angle . New coordinates (with new plane).
Drop and :
Then and .
§91 — Both at once: rotated axis in a tilted plane
Combining §89 (with three constants) and §90 (with one new constant ). With in the new most-general system:
But here are old §89 coordinates that themselves change under §90: .
Substitute:
§92 — Full composition: also rotate the axis in the new plane
One more rotation by in the new plane, with displacements giving constants . Setting after this further rotation:
Substituting into §91 and collecting:
Six arbitrary constants: . (The original have been absorbed into .)
§93 — Use of the most general equation
It is hardly possible to give an example in which it would be convenient to find the most general equation. The usefulness of the most general equation might be seen from the possibility of choosing the arbitrary constants in such a way that the equation would take its simplest form. (source: appendix4, §93)
In practice §92’s substitution is too unwieldy for direct calculation but invaluable as a theoretical instrument — it powers degree invariance (§94, see degree-invariance-surfaces), the canonical reduction of quadrics (Appendix Ch. 5 §§113–115, see quadric-canonical-form), and the proof that first-order surfaces are planes (§§97–98).
Cross-references
- Book II curve analogue: coordinate-transformations in chapter 2 §§17–24, with two angles instead of three.
- §92 supplies the substitution used in oblique-plane-section-method §49 (with the plane choice trivializing one angle).
- The angles are Euler’s first appearance of Euler angles — the rotation parameterization of .
Figures
 Figures 138–141
Figures 138–141