Sphere Sections
Summary: §§81–85 of the Appendix on Surfaces. The cleanest case of §51’s universal-quadric-section theorem: every plane section of a sphere is a circle. From the equation and an arbitrary cutting plane at perpendicular distance from the center, inclination , the §49 substitution gives the section equation
a circle of radius centered at the foot of the perpendicular from the sphere center. Closing §§84–85 re-state the universal oblique-section algorithm (figure 139) with — the appendix’s final consolidation of the section method developed in chapters 2 and 3.
Sources: appendix3, §§81–85. Figures 138, 139 in figures138-141.
Last updated: 2026-05-12.
§81 — Synthetic vs. algebraic setup
From elementary geometry every plane section of a sphere is a circle. The §81 program makes the algebraic derivation explicit, so it can serve as the simplest verification of the methods developed through chapter 2.
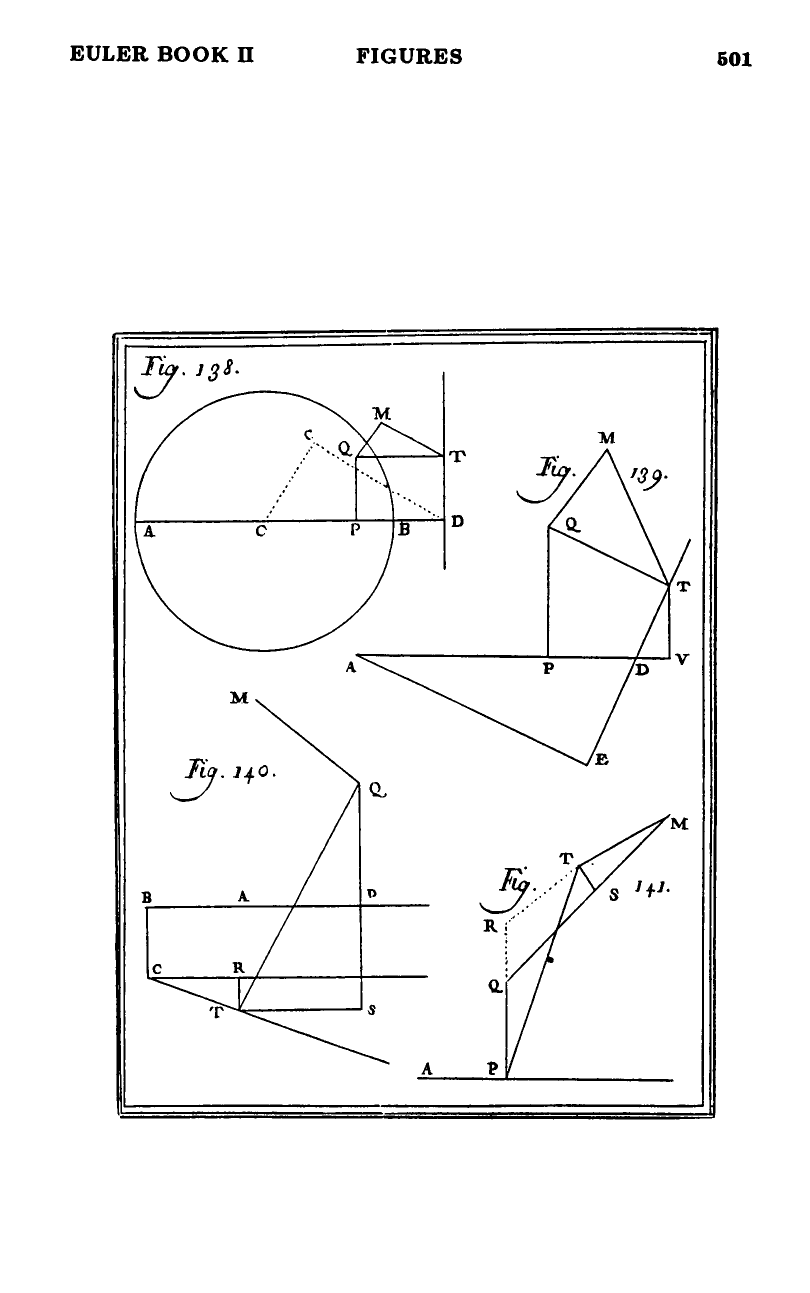
Sphere centered at , radius , in the plane of the table top (figure 138). The straight line is the trace of the cutting plane on the table; the perpendicular from to that line is ; the inclination of the cutting plane to the table is (source: appendix3, §81).
§82 — Substitution and section equation
Take as the section’s “abscissa axis” and the perpendicular to within the cutting plane as the section’s “ordinate axis.” Let . The chain of perpendiculars gives
(Sign convention as in figure 138.) Substituting into :
which expands to
(Note: the printed §82 has even though the substitution as written would give — Euler’s convention places the perpendicular at the foot of the inclination angle. The completed-square form §83 below is unambiguous.)
§83 — Recognition as a circle
Letting (so is shifted along the axis):
This is a circle with
center at the foot of the perpendicular from the sphere center to the cutting plane (i.e., at in section coordinates — the geometric point where the perpendicular from to the plane meets the cutting plane, source: appendix3, §83).
The radius vanishes when — the cutting plane is tangent to the sphere. Imaginary radius when — no intersection.
In a similar way we could investigate the section by any plane of any solid, provided we have the equation in three variables of the solid. (source: appendix3, §83)
§§84–85 — Closing general algorithm (figure 139)
The appendix closes with a re-statement of the oblique-plane-section-method from §§47–50, with figure 139’s labelling: , , plane inclination .
From any point on the section, drop table plane and let in the cutting plane. After dropping the perpendicular from to the axis in the table plane (source: appendix3, §85):
Hence the universal substitution:
Substituting into any surface equation produces the section equation in .
This method is almost the same as that which we used before in section 50. (source: appendix3, §85)
— ending the Appendix on Surfaces.
Cross-references
- Algebraic test for sphere: in the surfaces-of-revolution family. Genus: turned solid with all three coordinate planes diametral.
- Section method: special case of oblique-plane-section-method.
- The §51 universal-quadric-section theorem (general-quadric-surface) is here verified for the sphere — every section is a circle, the simplest conic.
- Compare cylinder-sections (only ellipses) and cone-sections (all conic species). The sphere has a degenerate version of both subcontrary-section circles, because all its plane sections are already circles.
Figures
 Figures 138–141
Figures 138–141