Chapter 13: On the Dispositions of Curves
Summary: The local counterpart to chapter 12. To study how a curve behaves near a chosen point , Euler translates the origin to via , and reads the local picture off the lowest non-vanishing homogeneous form in . Linear form → tangent. Quadratic form governs double points, with partitioning them into conjugate point / node / tangent contact. Cubic, quartic, … forms govern triple, quadruple, … points. Synthetically, a curve has a -fold point at iff its equation has the form , which forces order-by-multiplicity inequalities.
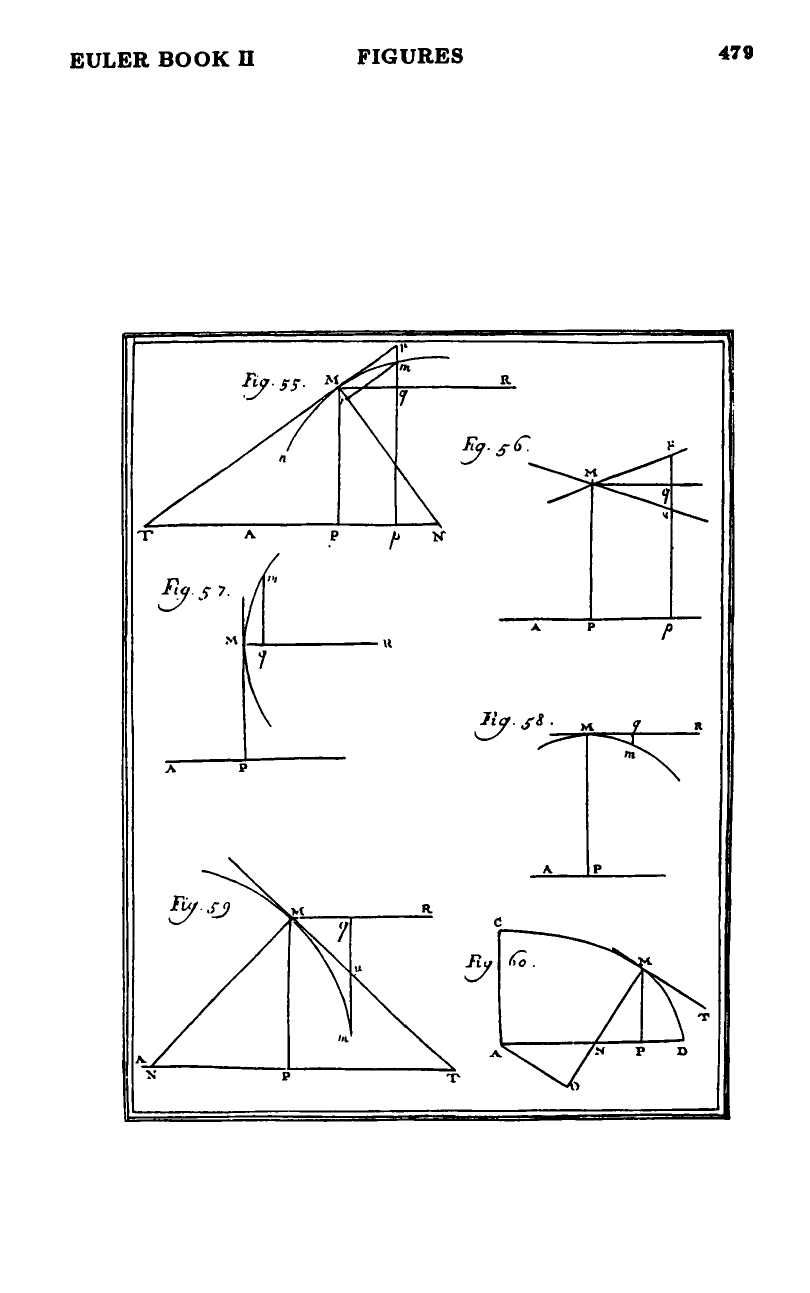
Sources: chapter13 (§§285–302). Figures 55–60 (in figures55-60).
Last updated: 2026-05-07.
The motivating analogy (§285)
Just as chapter 7 described the species of branches at infinity by finding straight lines or simpler curves which coincide with the given curve at infinity, this chapter investigates portions of the curve in a bounded region by finding straight lines or simpler curves that coincide with it for at least a small bit. Every tangent is a straight line that has at least two points in common with the curve at the point of tangency. There are also higher-order osculating curves that “kiss” a portion of the given curve more closely.
Strand 1 — tangent by translation (§§286–291)
Take a point on the curve with , . Substitute , (figure 55). The constant terms cancel because is on the curve, leaving an equation For very small , the second- and higher-degree terms are negligible, and the linear truncation defines a straight line through — the tangent. See tangent-by-translation.
The inclination ratio specializes to figures 57 (when , the ordinate itself is tangent) and 58 (when , the tangent is parallel to the axis).
Strand 2 — subtangent and subnormal (§§289, 292)
From Euler reads the subtangent and, after dropping the normal at , the subnormal (rectangular coordinates). Normal length . Three worked examples — parabola (, recovering [[parabola|chapter 6’s ]]), ellipse (), and a third-order seventh-species cubic (). See subtangent-and-subnormal.
Strand 3 — singular points by lowest jet (§§293–298)
When , the tangent is undefined and the second-degree form takes over. Three sub-cases by sign of the discriminant:
- : conjugate point (vanishing oval shrunk to a point);
- : node — two distinct real tangent directions, two crossing branches (figure 56);
- : tangent contact (cusp/tacnode in modern terms) — two coincident tangent directions.
If also vanish, the cubic form classifies triple points; quartic form classifies quadruple points; etc. See singular-points-by-jet. This complements multiple-points-on-curves from chapter 12, which arrived at the same taxonomy from the discriminant-collision direction.
Strand 4 — general equation of a curve with a multiple point (§§299–302)
Synthetically, a curve passes through iff its equation has the form (with irreducible against the linear factors). It has a double point at iff a triple point iff the equation is homogeneous of degree 3 in with polynomial coefficients, and so on. From these forms Euler reads off order-by-multiplicity ceilings via the chapter-4 line-intersection bound: cubics have at most one double point and no triple points; quartics in Euler’s count at most two double points or one triple; quintuple points need order ≥ 6 in his count; quadruple points need order ≥ 5; two quadruple points need order ≥ 8. (His bound for doubles on order is , an under-count for relative to the modern Plücker bound — see general-equation-multiple-point.)
Connection to differential calculus (§290)
Euler explicitly notes that the truncate-to-linear method works only when the curve’s equation is non-irrational and free of fractions. For irrational or fractional equations, modifications are needed — and “those modifications give us differential calculus.” This chapter is, in effect, the algebraic prototype of the differential-calculus tangent algorithm.
Figures
 Figures 55–60
Figures 55–60
Related pages
- chapter-12-on-the-investigation-of-the-configuration-of-curves — the dual problem (singular points from discriminant collisions in ).
- tangent-by-translation — the master method (§§286–291).
- subtangent-and-subnormal — local rectangular invariants (§§289, 292).
- singular-points-by-jet — multiple-point taxonomy from the lowest jet (§§293–298).
- general-equation-multiple-point — synthetic form for prescribing a -fold point (§§299–302).
- multiple-points-on-curves — chapter 12’s discriminant-collision approach to the same taxonomy.
- line-curve-intersection-bound — the master bound behind every order-by-multiplicity ceiling.
- parabola — §150’s , recovered as Example I in §289.