Chapter 14: On the Curvature of a Curve
Summary: A second-order extension of chapter 13’s tangent algorithm. After translating origin to a point on the curve, the linear truncation gives the tangent. Adding the quadratic terms and rotating to the normal axis gives the osculating parabola, . Replacing the parabola with the unique circle of the same vertex-curvature gives the osculating circle, with radius of curvature The chapter then handles convexity (sign of the radical), special configurations (, ), a worked ellipse example, the inflection-point classification (when ), and curvature at multiple points (cusps and higher-order branches), closing with a three-genus classification of all possible local phenomena and a discussion of L’Hospital’s “cusps of the second species.”
Sources: chapter14 (§§304–335). Figures 55–67 (in figures55-60, figures61-67).
Last updated: 2026-05-11.
The motivating analogy (§304)
Just as we have previously investigated straight lines which indicate at a point the direction of a curve, so now we investigate simpler curves which at some place coincide with a given curve so closely that, at least for a very small distance, the two are the same. — §304
Chapter 13 found the tangent line by truncating the local expansion to linear terms. This chapter goes further: keep quadratic terms, get an osculating parabola; replace that parabola by the equally-curved circle, get the osculating circle with its radius of curvature. Higher terms enter only when the second-order data degenerates. The whole program parallels chapter 7’s treatment of branches at infinity, where rectilinear, parabolic, and curvilinear asymptotes refine each other in an analogous hierarchy. See osculating-curves.
Strand 1 — the osculating parabola (§§305–307)
Take the local equation in from tangent-by-translation:
Rotate to coordinates along the normal and tangent at :
Then is infinitely smaller than (since comes out of squares and higher powers of ). Keeping linear and quadratic terms, the local equation reduces to
a parabola with vertex at , axis along the normal, and latus rectum . See osculating-parabola.
Strand 2 — the osculating circle and radius of curvature (§§308–310, §318)
Define the curvature of the given curve at to equal that of the osculating parabola at its vertex. Replace the parabola by the circle of the same vertex-curvature. Inverting the algorithm on the circle gives the conversion: a parabola corresponds to a circle of radius . Hence the radius of curvature of the original curve at is
This single formula governs the curvature of every algebraic curve at every non-singular point. Its applications (§318): if is known at every point, the curve can be reconstructed as a chain of small circular arcs. See osculating-circle.
Strand 3 — convexity and special cases (§§311–315)
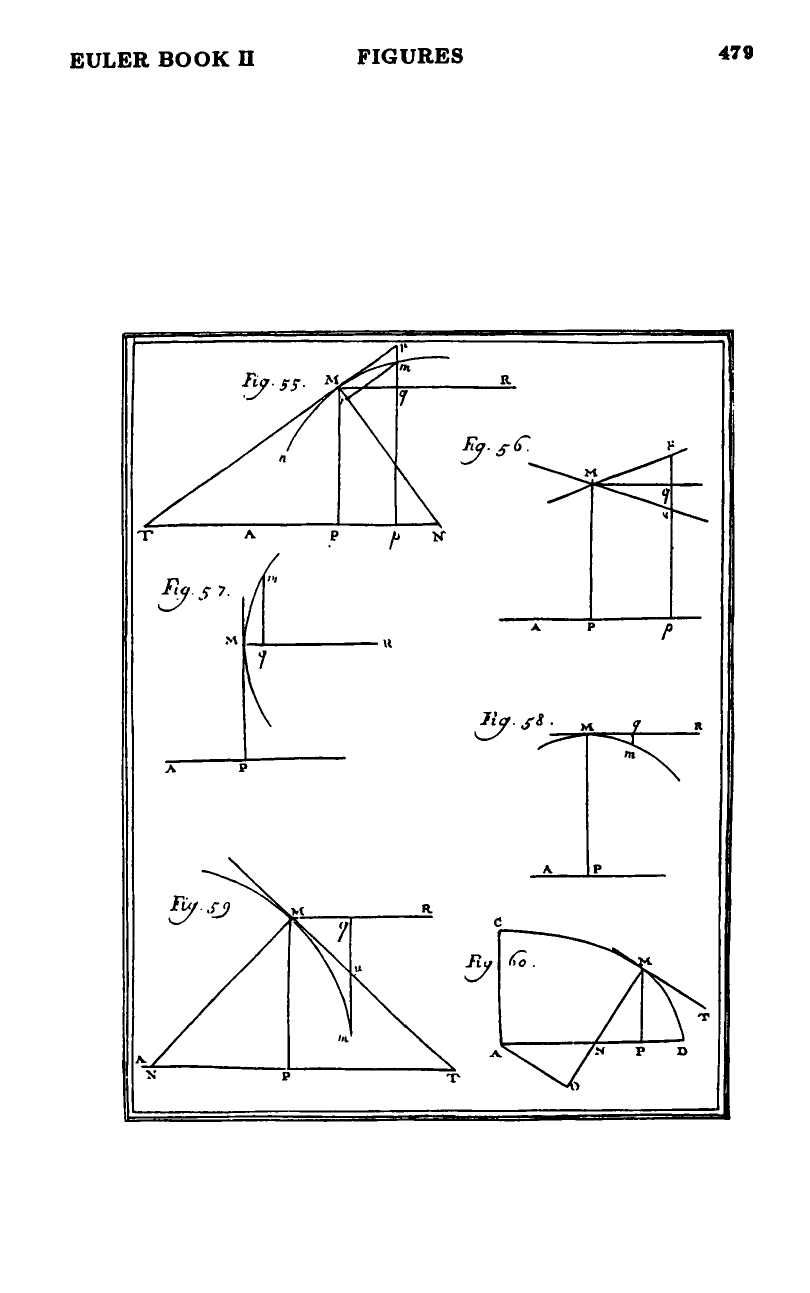
The radius formula is signed only up to the ambiguity of . Resolving the ambiguity requires asking which side of the tangent the next point lies on. Euler computes the perpendicular drop and finds the sign rule: the curve is concave with respect to iff . Two special configurations collapse the formula:
| Special case | Tangent direction | Radius |
|---|---|---|
| (figure 57) | ordinate itself | |
| (figure 58) | parallel to the axis | |
| general (figures 55, 59) | inclined |
See convexity-from-osculating-circle.
Strand 4 — worked ellipse example (§§316–317)
For the ellipse at point :
After applying the constraint ,
The form is symmetric under exchange of the two axes, with the perpendicular from the center to the tangent at (figure 60). At the major-axis vertex this gives — half the latus rectum, recovering the classical fact. See osculating-radius-of-ellipse.
Strand 5 — inflection points by vanishing curvature (§§319–322)
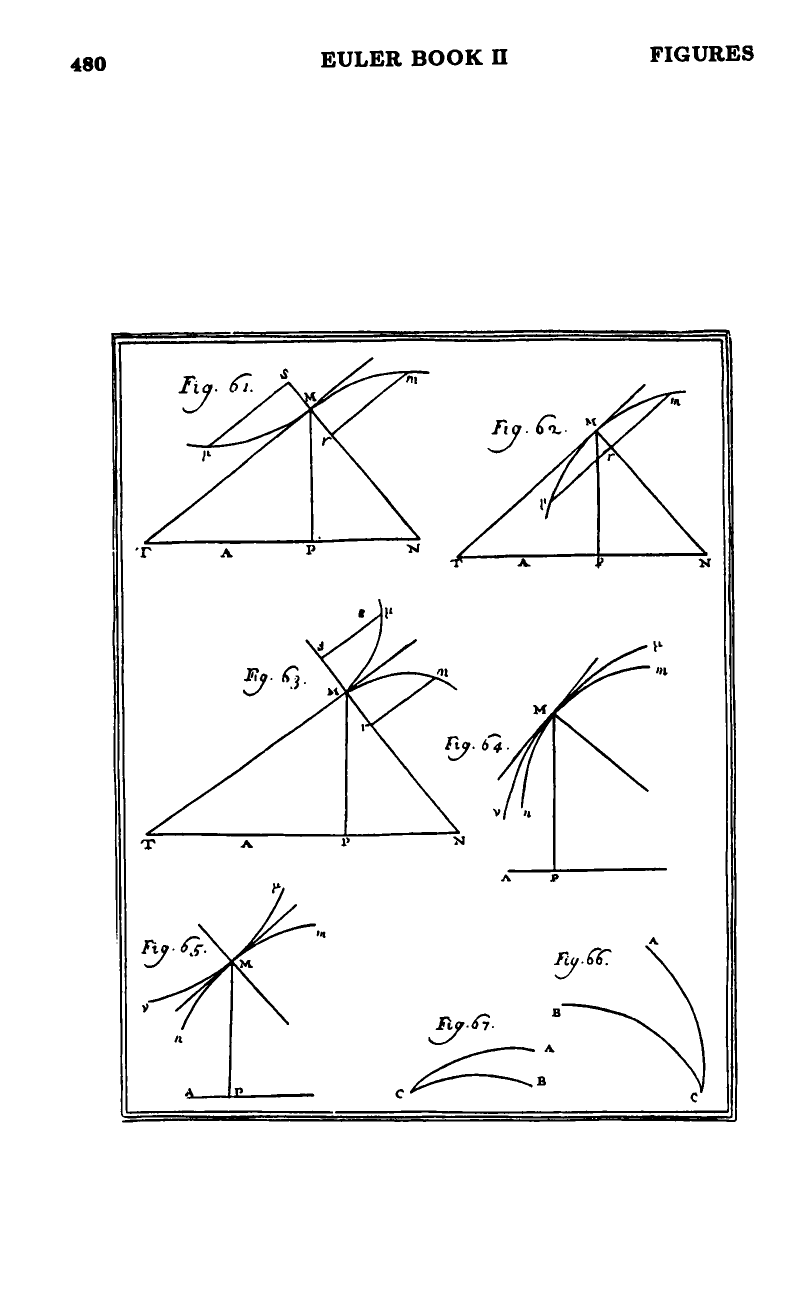
When , the radius is infinite and the osculating circle degenerates to the tangent line. Higher terms decide between an actual inflection (curve crosses through tangent) and a smooth arc just happening to be locally straight to second order. The expansion in the rotated coordinates becomes
The first non-vanishing coefficient gives the answer: odd-power leading term → inflection (figure 61); even-power leading term → both branches on the same side of the tangent, no inflection (figure 62). See inflection-by-vanishing-curvature.
Strand 6 — curvature at multiple points (§§323–331)
When ( is a multiple point, figure 56), Euler treats each branch separately. For a branch with its own tangent direction the analysis reduces to the simple-point case — apply the §§319–322 parity rule to that branch’s leading exponent. When two or more branches share a tangent, the local equation has the form
and the branch is of order . Cases:
- , : cusp with infinitesimal osculating radius (figure 63).
- , odd: cusp with infinite osculating radius.
- , branch factors as and : two parabolic-vertex branches; same sign of → internally tangent arcs (figure 64); opposite signs → externally tangent (figure 65).
- general : odd behaves like a simple branch; even produces a cusp; the relation of to controls whether the radius is infinitely small or large.
See curvature-at-multiple-points.
Strand 7 — three-genus master classification (§§332–335)
The phenomena which can occur are reduced to three types. — §332
| Genus | Configuration | Osculating radius |
|---|---|---|
| 1. Continuous curvature | smooth arc, no inflection, no cusp | finite |
| 2. Inflection point | curve crosses through its tangent | infinite or zero, with odd-exponent leading term |
| 3. Cusp / reflex point | two branches mutually tangent | infinite or zero, with even-exponent leading term |
Two configurations are explicitly not algebraic: a finite-angle corner (figure 66) and a smooth-cusp where the two tangent branches are one concave / one convex (figure 67). The latter is L’Hospital’s “cusp of the second species,” which Euler initially ruled out but then concedes does occur — as a feature of how branches are paired into continuous arcs when both branches come from the same algebraic equation. The example (from ) is an explicit fourth-order case. See three-genera-of-local-curvature.
Connection to subsequent chapters
The radius of curvature is the headline quantity that Euler will rely on throughout the rest of Book II for arc-length, surface area, and intersection theory of curves with prescribed local behavior. The §318 picture — “the nature of the curve is seen quite clearly” if is known at every point — is the geometric content that the Institutiones calculi differentialis will recast as the differential formula .
Figures
 Figures 55–60
Figures 55–60
 Figures 61–67
Figures 61–67
Related pages
- osculating-curves — what “kissing” means.
- osculating-parabola — §§305–307 derivation.
- osculating-circle — §§308–310, §318: the radius formula and its uses.
- convexity-from-osculating-circle — §§311–315: signed analysis.
- osculating-radius-of-ellipse — §§316–317: worked example.
- inflection-by-vanishing-curvature — §§319–322: zero-curvature case.
- curvature-at-multiple-points — §§323–331: cusps and higher-order branches.
- three-genera-of-local-curvature — §§332–335: master classification.
- chapter-13-on-the-dispositions-of-curves — the linear-truncation predecessor.
- singular-points-by-jet — chapter-13 jet classification reused here.