Appendix Chapter 6 — On the Intersection of Two Surfaces
Summary: Closes the Appendix and Book II. Non-planar curves in space need three coordinates, expressed by two equations in — two surfaces whose intersection is the curve. Eliminating one variable yields the projection onto a coordinate plane (figure 148); two projections determine the curve. Tangency is read off when the projection eliminant has a double root: worked examples include sphere-plane tangency (§141) and cone-sphere tangency along a circle (§§143–146). The tangent plane at a surface point is built from tangents to two perpendicular plane sections through (§§147–149, figure 149). The Bezout-type bound: two surfaces of orders have intersection projection of order (§150). Closing example (§152): when does the intersection lie in a plane?
Sources: appendix6, §§131–152. Figures 148, 149 in figures148-149.
Last updated: 2026-05-12.
§§131–133 — Non-planar curves need two equations
A single equation in determines a surface, not a curve. Specifying a curve in space requires two equations in three variables; the third equation (in the remaining two) is implied by elimination.
The nature of any non-planar curve is most conveniently expressed by two equations in three variables. (source: appendix6, §133)
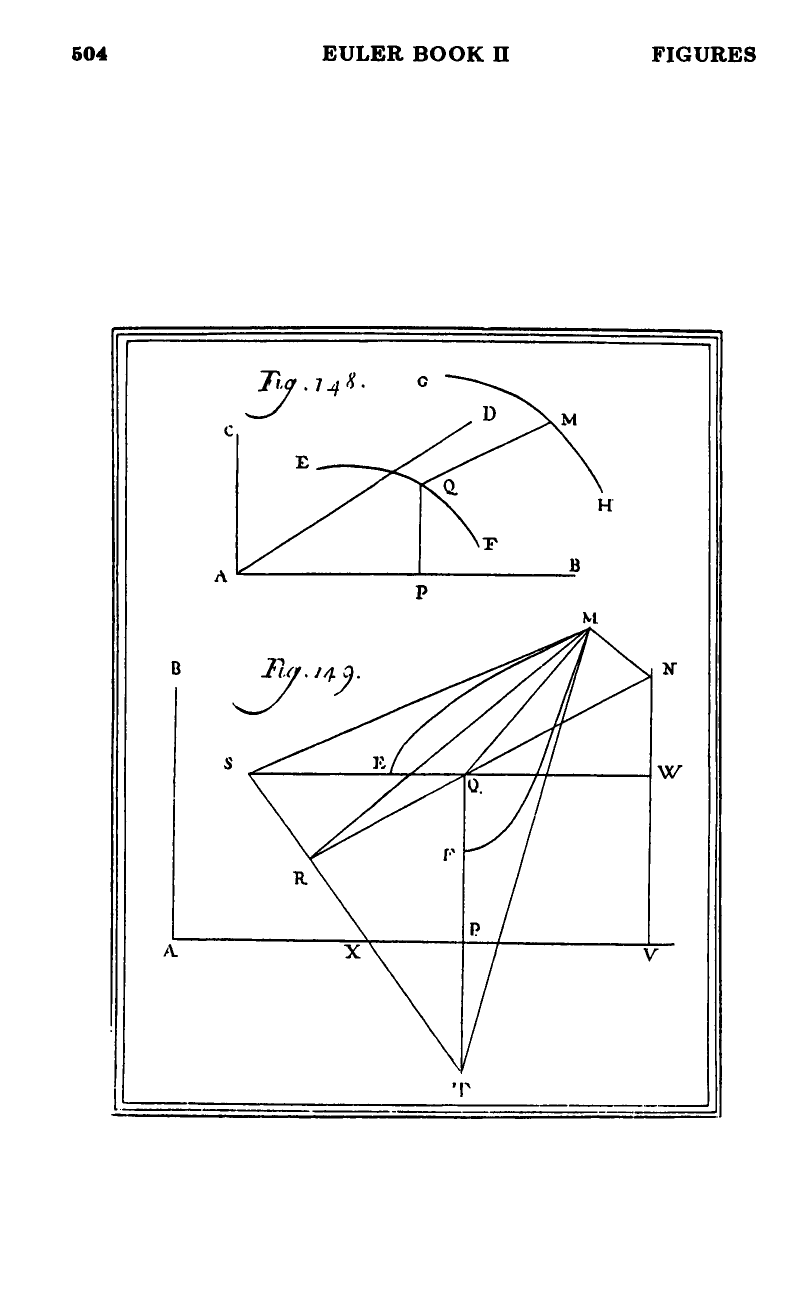
§§134–136 — Projection onto a coordinate plane (figure 148)
Given a non-planar curve , drop from each point a perpendicular to the plane . The feet trace the projection curve in the plane whose equation is obtained by eliminating from the two given equations. Two projections (say onto and ) together determine the original curve in space. See non-planar-curves-by-projection.
§§137–138 — Intersection of two surfaces by elimination
Given two surfaces by equations in , the intersection is the curve satisfying both. Eliminate one variable (e.g., ) → an equation in giving the projection onto the -plane. For the special case of a surface cut by a plane , substitute — directly the oblique-plane-section-method in disguise. See intersection-of-two-surfaces.
§§139–146 — Tangency by double roots
A tangency is nothing but the coincidence of two intersections. (source: appendix6, §139)
If the projection equation has a double root (a perfect-square factor), the two surfaces touch along the corresponding subset:
- Single tangent point: the projection collapses to one point with two equal roots.
- Tangency along a curve: the projection equation has two equal nonlinear factors (e.g., divisible by a perfect square).
- Tangency in two points: four complex factors.
§§140–141 work the sphere-plane tangency: sphere cut by projects to
an ellipse when the plane crosses the sphere, a single point (tangency) when , with tangent point
§§143–146 work the cone-sphere tangency in detail: sphere and cone with vertex distance from the sphere’s center. For the right cone (), tangency along a circle occurs when . For the scalene cone, two isolated tangent points result. See tangency-of-surfaces.
§§147–149 — Tangent plane to a surface at (figure 149)
The construction:
- Cut the surface at with the plane perpendicular to along the line parallel to . Call this section . Its tangent at , the line , hits at ; is the subtangent.
- Cut again at with the plane perpendicular to along . Call this section . Tangent has .
- The tangent plane contains both tangents.
Reading off the orientation: gives the trace’s slope in the plane; gives the plane’s inclination to . The normal direction:
§150 — Bezout bound for surfaces
If one surface has order and the other has order , then the projection of the intersection never has order greater than . (source: appendix6, §150)
Two planes: order-1 projection (a line). Plane + quadric: order-2 projection. Two quadrics: order-4 projection. In general . The 3D analogue of intersection-product-degree-bound. See bezout-bound-surfaces.
§§151–152 — When does the intersection lie in a plane?
The intersection of two surfaces is generically a non-planar curve, but coincidentally planar when both equations satisfy some common linear equation . Equivalently: write from the two equations, then check whether some linear combination leaves only first-degree-in- and constant terms.
§152’s worked example: right cone and elliptic hyperboloid . Subtracting: (a parabola in the -plane), and — so the intersection lies in the plane . See planar-intersection-condition.
Closing remark — end of the Appendix
These two books have prepared the way for that science. (source: appendix6, §152)
Where “that science” is the calculus, the analysis of the infinite proper. Book II’s surfaces appendix is the final piece of the pre-calculus apparatus: with surfaces, intersections, tangent planes, and projections in hand, the next step is differentiation.
Cross-references
- §150’s bound lifts intersection-product-degree-bound from curves to surfaces (modulo projection — the projection bound applies, the actual count is more subtle since spatial intersection can fail to project bijectively).
- §§147–149’s tangent-plane construction is the surface analogue of tangent-by-translation (Book II §§286–291).
- The cone-sphere tangency (§§143–146) is a 3D close cousin of asymptotes-of-hyperbola’s tangent-at-infinity geometry — both encode coincidence of two intersections as double roots of the section eliminant.
Figures
 Figures 148–149
Figures 148–149
Related pages
- non-planar-curves-by-projection
- intersection-of-two-surfaces
- tangency-of-surfaces
- tangent-plane-to-surface
- bezout-bound-surfaces
- planar-intersection-condition
- appendix-4-on-the-change-of-coordinates
- appendix-5-on-second-order-surfaces
- intersection-product-degree-bound
- tangent-by-translation
- oblique-plane-section-method