Appendix Chapter 1 — On the Surfaces of Solids
Summary: Opening chapter of the Appendix on Surfaces. Euler extends Book II’s coordinate apparatus from plane curves to surfaces of solid bodies. Three orthogonal axes give each point of a surface three coordinates ; the surface is then characterized by an equation , just as a curve was by . Single-valued vs. multi-valued, algebraic vs. transcendental, and parity-based reflective and central symmetries are all imported from Book II to the new dimension.
Sources: appendix1, §§1–25. Figures 119, 120 in figures119-120.
Last updated: 2026-05-12.
§1 — From plane curves to surfaces
Curves that do not lie in a plane have two kinds of curvature — recently treated by Clairaut — and are inseparable from the surfaces on which they sit. Euler therefore opens this Appendix by treating space curves and surfaces simultaneously.
§§2–3 — Surfaces are to planes as curves are to lines
Surfaces are either planar or non-planar (convex, concave, or mixed). A surface is planar iff every four of its points lie in one plane, just as a curve is straight iff every three of its points lie on one straight line. To investigate a non-planar surface, choose an arbitrary plane and study the perpendicular distance from each point of the surface to it (parallel to how a plane curve is studied via distances to a chosen axis).
§§4–12 — Coordinate apparatus
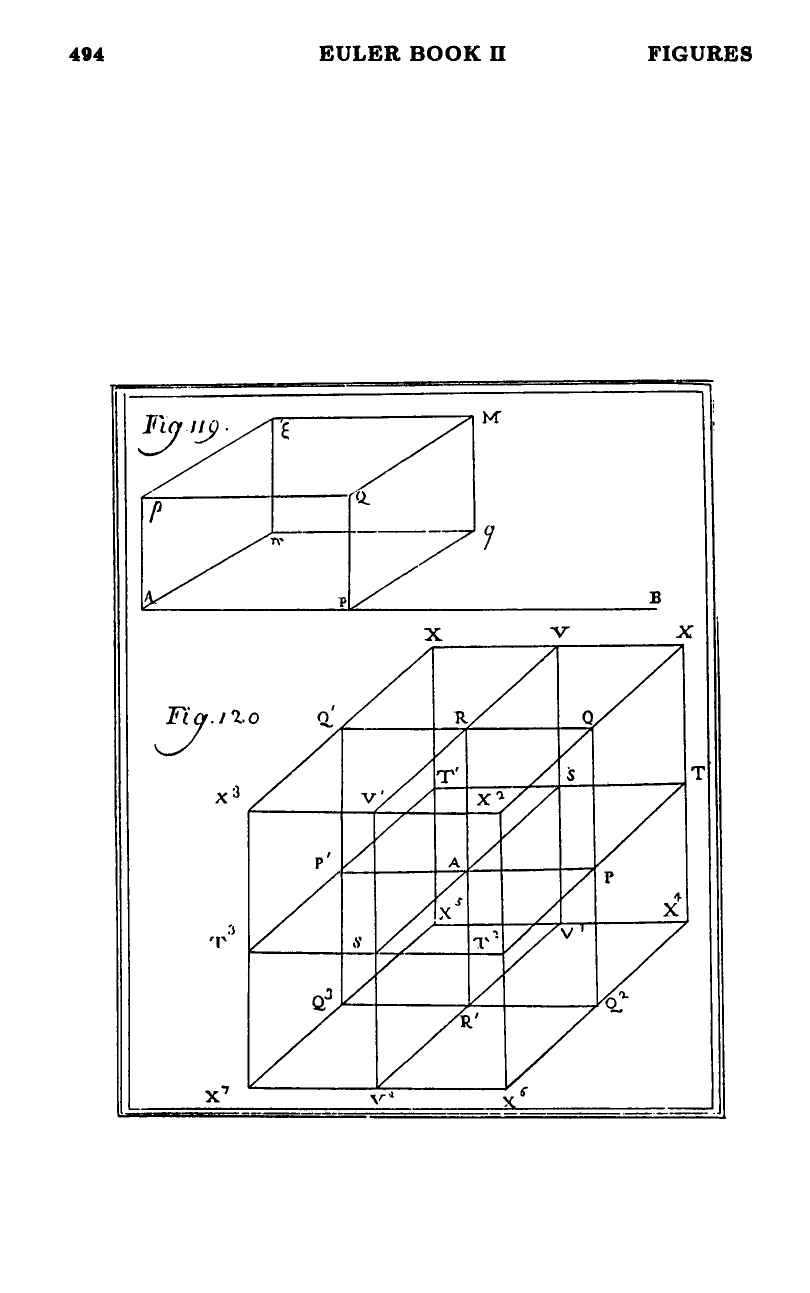
Three perpendicular coordinates , , locate any point in space (figure 119). Three mutually perpendicular planes meet at the origin , and the same surface admits six different coordinate orderings (§10) depending on which plane plays the role of and which axis lies in it. The straight-line distance from to is .
The surface itself is given by an equation in ; the value of at each records the perpendicular distance from the surface to the chosen plane (positive above, negative below, complex = no point on that perpendicular, multiple = the perpendicular cuts the surface in several points). See surface-coordinates-and-equation.
§§6–7 — First classifications
A continuous (regular) surface is given by a single equation; an irregular surface is patched from several (e.g. a sphere joined to a cone). Among regular surfaces, the principal division is into algebraic and transcendental — exactly the curve dichotomy from chapter 1 of Book II, lifted one dimension up. See algebraic-and-transcendental-surfaces.
§§8–9 — Single-valued vs. multi-valued
If with a single-valued (non-irrational) function, every perpendicular line through in the plane meets the surface in a single point — never in a complex number. The next levels are
exactly mirroring multi-valued-curves for plane curves.
§§13–14 — Diametral planes
If the equation contains only with even exponents, the surface has matching parts on either side of the plane — so bisects the solid. Such a plane is called a diametral plane, the surface analogue of a Book II diameter-of-conic (and of the diameter-and-center-from-equation parity calculus). The sphere has all three coordinate planes diametral. See diametral-plane.
§§15–25 — Octants and region symmetries
The three coordinate planes divide space into eight regions (figure 120), labelled (§§15–16). Two regions are conjugate if they share a tangent plane (one coordinate sign flipped), disjoint if they share only a tangent line (two flipped), opposite if they share only the point (all three flipped). Euler tabulates the relationships in §§17–18.
The parity of exponents in the equation governs which regions contain congruent parts of the surface (§§19–25):
- everywhere of even exponent → 4 pairs of congruent regions (mirror across );
- joint degree of everywhere even or everywhere odd → another 4 pairs (rotate 180° about an axis);
- all three taken together everywhere even or odd → opposite-region congruence (central symmetry);
- combining several conditions → 4-fold or full 8-fold congruence.
Full development in octants-and-region-symmetries.
Cross-references
- Coordinate setup parallel to abscissa-and-ordinate (Book II Chapter 1).
- Multi-valued reduction parallel to multi-valued-curves.
- Diametral plane is the 3D analogue of diameter-and-center-from-equation (Book II Chapter 15).
- Octant congruence rules parallel to the §§337–343 parity arguments for plane curves with diameters and centers.
Figures
 Figures 119–120
Figures 119–120