Oblique Coordinates
Summary: Coordinates in which the ordinate makes a fixed but not-necessarily-right angle with the axis. Every curve admits an equation in oblique coordinates for any chosen obliquity, axis, and origin, so the family of all oblique-plus-rectangular equations for a given curve is wider than the orthogonal family alone. Euler gives the substitutions for passing between rectangular and oblique systems, derives the most general equation of a curve (§45), and observes that the degree of the equation is still preserved (§46).
Sources: chapter2 (figures 14–15)
Last updated: 2026-04-24
Setup (§42)
Up through §41, Euler had always taken the ordinate perpendicular to the axis. The only change in this section is to relax that assumption: the ordinate is drawn at a fixed angle to the axis , not necessarily . The pair is then a pair of oblique coordinates. The curve is the same; the description changes.
Since the axis, origin, and obliquity are each arbitrary, the family of equations for a given curve is now parametrized by five quantities: (the rigid motion parameters of coordinate-transformations) plus the obliquity angle. The rectangular case is the specialization .
Rectangular to oblique (§43)
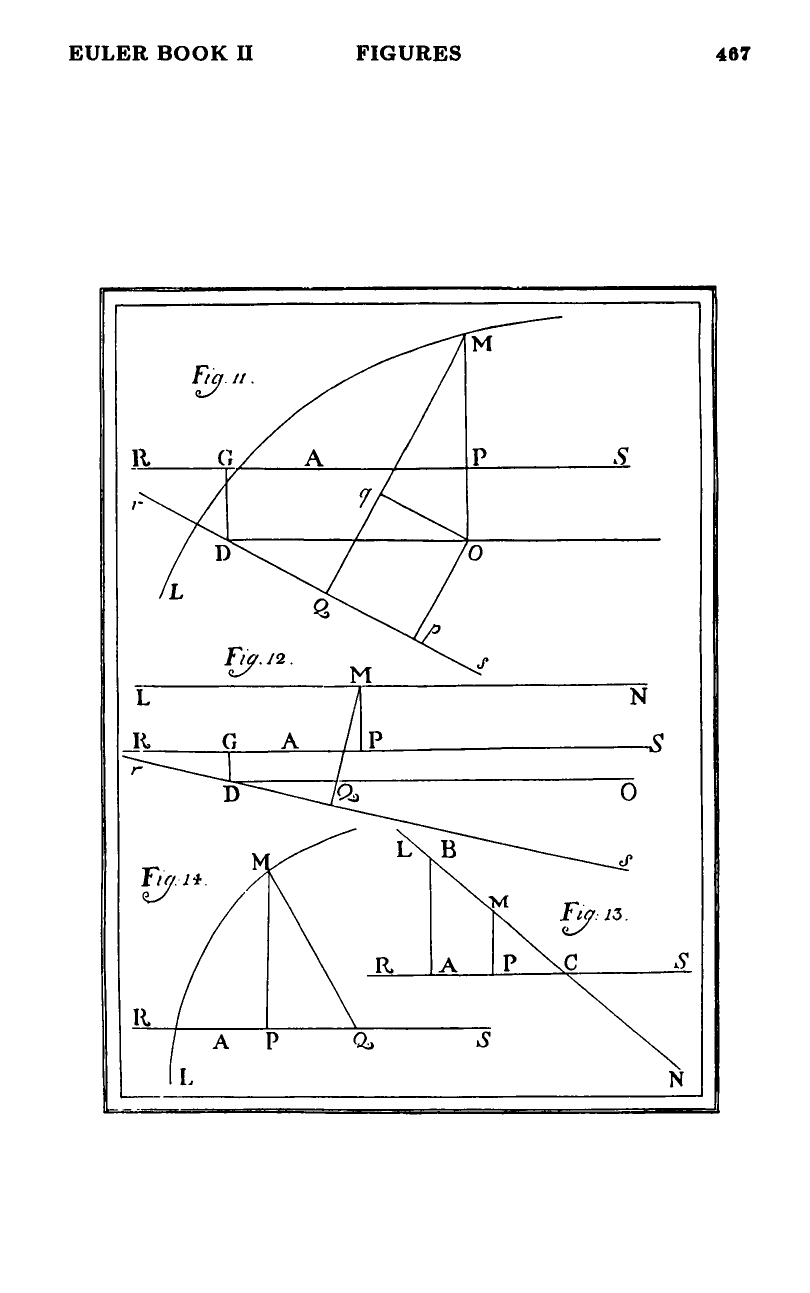
Keep the same axis and origin , but replace the orthogonal ordinate by the oblique one at angle . At a point , let the orthogonal coordinates be , , and the oblique coordinates be , where is the foot of the oblique ordinate and the same curve point (figure 14). Set , . In the right triangle ,
Hence
and conversely
Substituting and into a rectangular equation gives an oblique equation with obliquity .
Oblique to rectangular (§44)
Same figure, read backwards. Given an oblique equation in with obliquity , drop the perpendicular from to the axis to recover orthogonal coordinates , . Since
substituting these for and in the oblique equation yields the rectangular equation.
The most general equation (§§45–46)
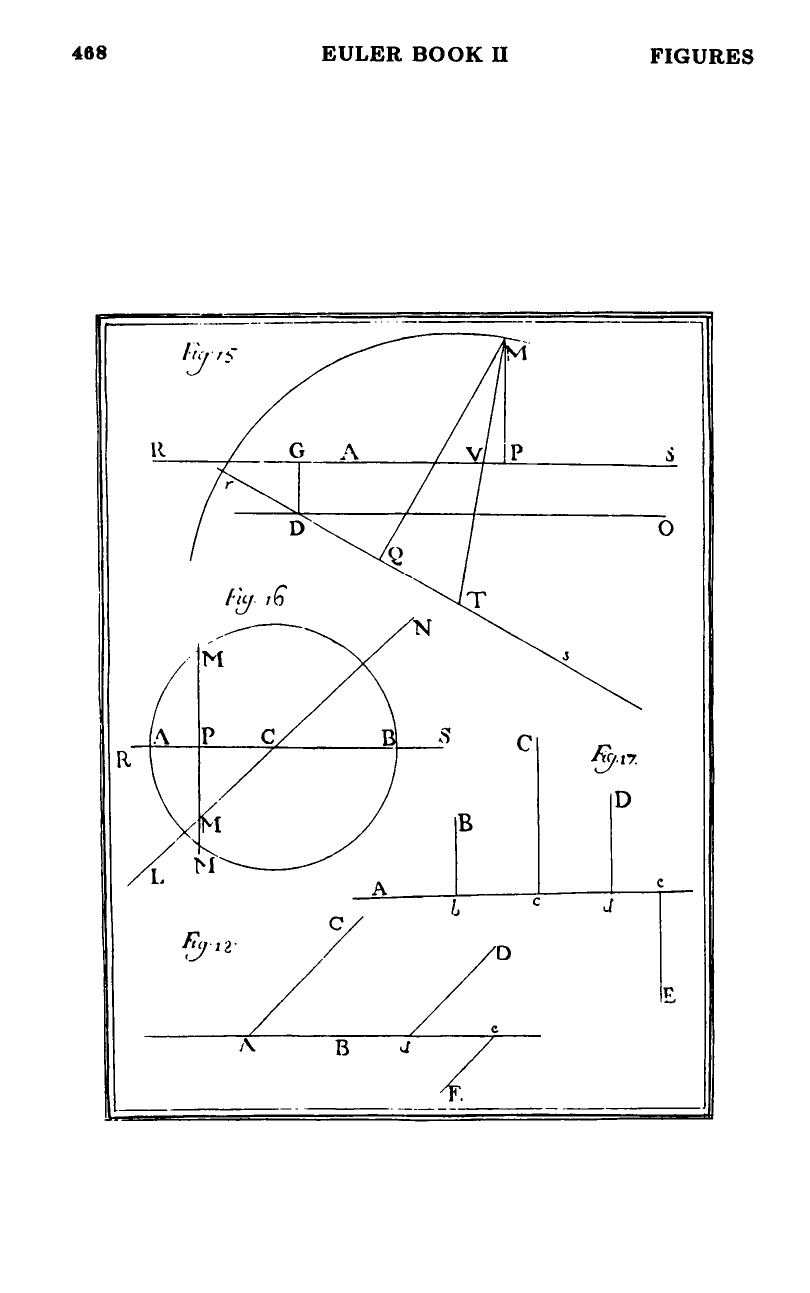
Combine the oblique substitution with the rigid motion of §§33–34. Start from a rectangular equation in for a curve . Choose any new axis with any origin and any obliquity (figure 15). Let , , and let the new axis make angle with the old (via parallel to ), with , . Let the new oblique coordinates be , , and the auxiliary rectangular-on-the-new-axis coordinates be , . From §43 applied to the new axis,
Combining with the rigid motion (§34), Euler arrives at
He identifies as the cosine of the angle the new oblique ordinate makes with the old axis, and as its sine. Substituting these expressions for and into the original rectangular equation produces the most general equation of the curve — general in axis, origin, and obliquity alike (source: chapter2, §45).
Degree is still preserved (§46)
The substitutions above are still first-degree in . Hence
the most general equation is of the same degree as the original equation in and . It follows that no matter how the equation of a curve may be transformed by changing the axis and the origin and the inclination of the coordinates, still the equation keeps the same degree. (source: chapter2, §46)
Different degrees therefore remain a sure sign of different curves, even when the coordinate systems being compared are not both rectangular. See degree-invariance.
Figures
 Figures 11–14
Figures 11–14
 Figures 15–18
Figures 15–18